Depth Estimation from Camera Image and mmWave Radar Point Cloud
Akash Deep Singh1 Yunhao Ba1 Ankur Sarker1 Howard Zhang1 Achuta Kadambi1 Stefano Soatto1 Mani Srivastava1 Alex Wong2
University of California, Los Angeles1 Yale University2
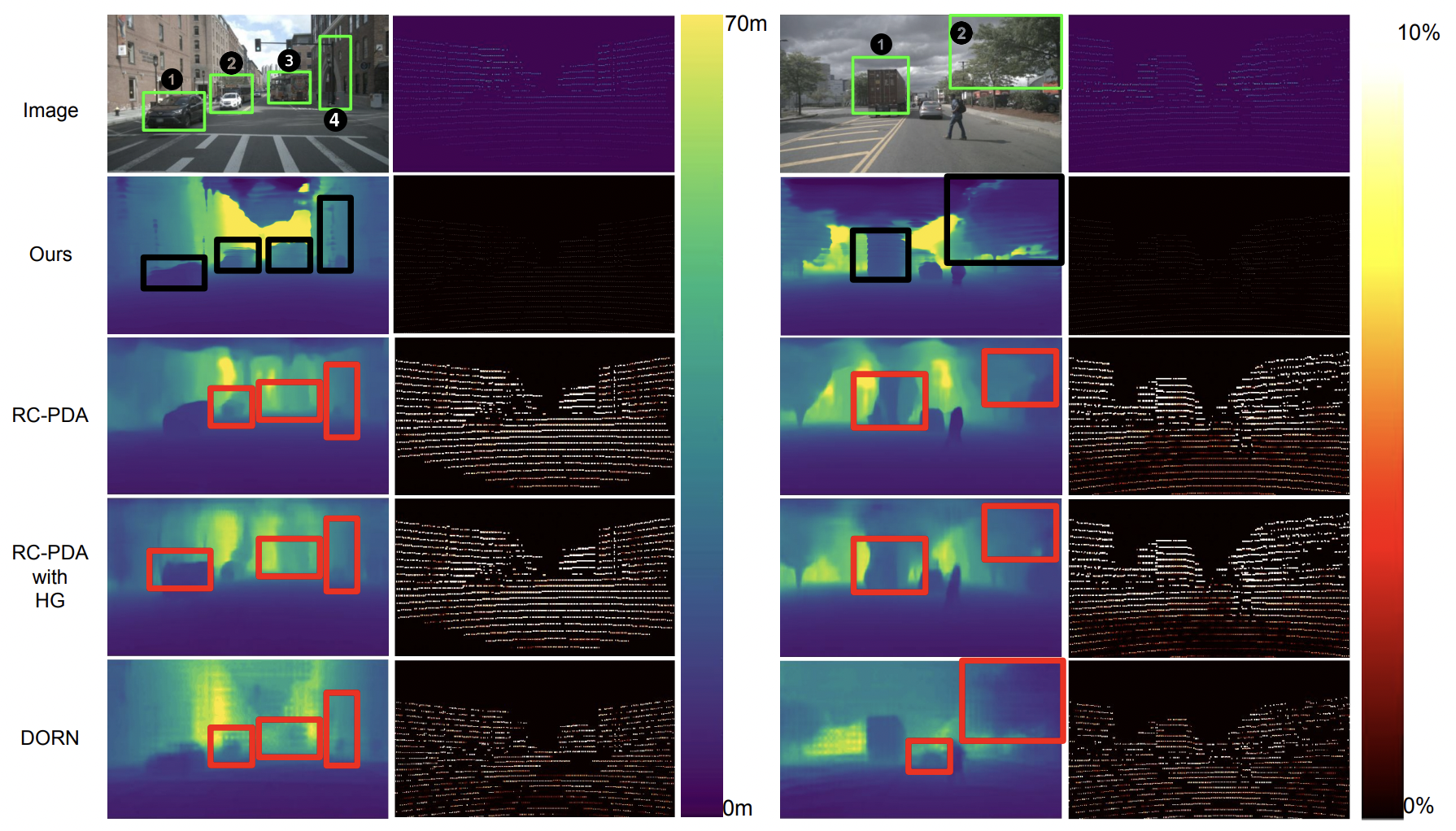
CVPR 2023, Vancouver, Canada Depth estimation using a mmWave radar and a camera. (a) RGB image. (b) Semi-dense depth generated from associating the radar point cloud to probable image pixels. (c) Predicted depth. Boxes highlight mapping of radar points to objects in the scene.
Depth estimation using a mmWave radar and a camera. (a) RGB image. (b) Semi-dense depth generated from associating the radar point cloud to probable image pixels. (c) Predicted depth. Boxes highlight mapping of radar points to objects in the scene.